GPS 经常是我们谈起无人机系统时首先想到的功能模块,而能够按照预先规划的飞行路线进行自动飞行,也是无人机在功能上与航模的主要区别之一。
不管是天上飞的,地上跑的,还是海里游的交通工具或仪器设备,如果我们希望能引导它们到期望的目标位置,就需要获得被控对象在某个坐标系中的具体坐标,无人机导航也是如此。我们期望无人机从 A 点飞到 B 点,就要不断通过 GPS 或其它导航仪器获取无人机当下的位置坐标,并根据无人机的位置调整无人机的姿态,最终到达目的地。
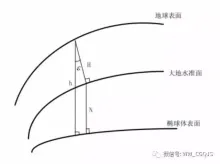
在无人机导航中,对 GPS 的数据经常出现一些误解,比如 GPS 输出的高度坐标是相对于海平面,所以应该像经纬度一样可以直接使用;通过 GPS 获得的速度信息可以直接使用;IMU 输出的飞行器加速度是平面加速度……
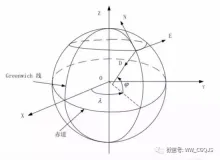
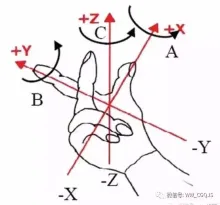
中学物理知识告诉我们,当我们描述物体运动时,一定是相对于特定坐标系的, GPS 和 IMU 等设备在输出运动和位置数据时也是如此,这些问题所涉及的正是无人机导航中的基础概念——无人机坐标系——这也是无人机导航中最容易让人混乱的概念之一。
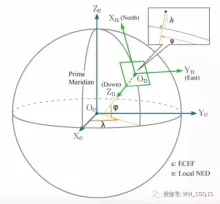
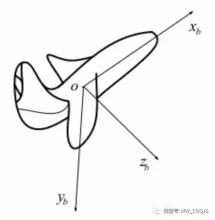
无人机导航中常见的坐标系包括: